


RCgothic
-
Posts
2,872 -
Joined
-
Last visited
Content Type
Profiles
Forums
Developer Articles
KSP2 Release Notes
Bug Reports
Posts posted by RCgothic
-
-
-
SN11 starts construction:
-
Which implies Vulcan superheavy can't manage heavier payloads (pad TWR) but can send them further. Better for lunar or deep space missions.
-
Vulcan superheavy?
-
-
SN10 gets an extra ring on its forward dome...
-
-
-
The fairings didn't stick the Starlink landing unfortunately:
-
20 minutes ago, sevenperforce said:
Well, technically the engines need an operating hydraulic line to gimbal.
But in this particular case I was thinking of two central engines lit simultaneously and attempting to provide the maximum roll authority; they would point exactly opposite each other but at an angle.
They couldn't interfere with each other that way, and any other TVC engines in the way could just gimbal out the way.
-
Well that was fun to watch, but I still don't think SRBs should be anywhere near a crewed launch.
-
10 minutes ago, sevenperforce said:
They could gimbal quite close to each other for roll control, particularly if the center two engines were the only ones lit. But still probably not quite that close; you're right. And the angle would be offset anyway.
It's there anything stopping all the engines gimbaling even with only 2 lit?
-
1 hour ago, sevenperforce said:
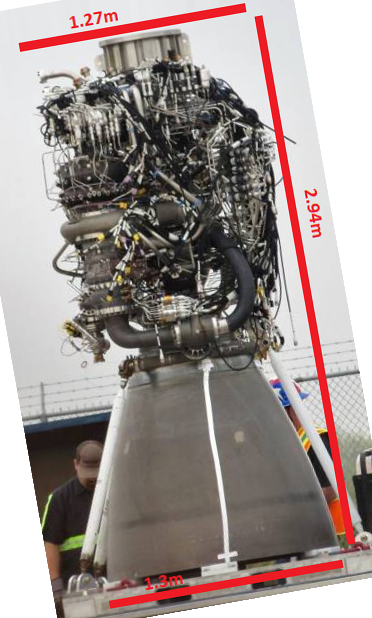
Raptor is a really big engine though.
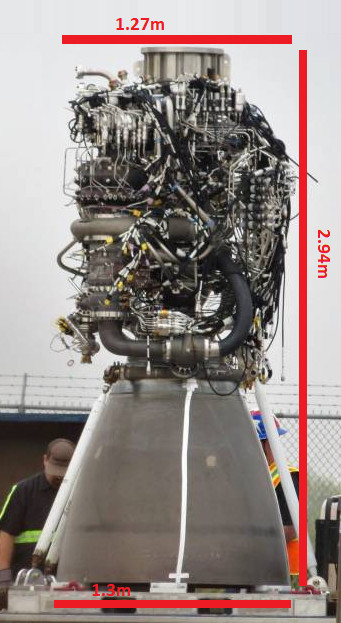
The above image is a early dev model, so it has a lot of wiring and such that is not present in flight articles, but the overall footprint/cross-section is going to be very similar. They will want to put the engine itself in a frag shield, so the cross-sectional footprint of the engine is not actually going to be significantly smaller than the cross-sectional footprint of the bell itself. The Merlin 1D, which is GG, has a much smaller single turbopump and a much smaller upper footprint.
While we're on the subject of dimensions...we know from the video of the Starship hop test that the entire engine is actuated via TVC rather than the nozzle alone. We know we need to have 10 degrees of gimbal in any direction, so we can calculate the gimbal footprint:
You need 0.51 meters of clearance between a gimballed Raptor and any fixed engine, and 1.02 meters of clearance between any two gimballed Raptors.
Will they though?
Pretty sure there's no situation where you'd want Raptors to Gimbal towards each other. They'd be fighting each other's control.
-
1 hour ago, SOXBLOX said:
Welding is ridiculous! The vibrations and thermal expansion will tear them apart! Are they really doing that!?!?
No positive confirmation for booster, but it has seriously been suggested by Elon for RVac on the Starship (plus double bell) as a way of stabilising the bells against turbulent flow separation for sea level aborts.
-
16 hours ago, sevenperforce said:
Starship is 9m standard and I believe the official renders show a 10m skirt.
He says the outer ring are fixed and do not gimbal at all. So you only need space for TVC in the middle. They want a LOT of control authority on Starship, so we could conceivably be looking at 10 degrees or more in any direction, and they wouldn't do different engines on the booster.
Do you mean centimeters? Or are you talking about something different?
Yes, I meant centimeters. I keep getting the diameter confused with the orange one. 9m works fine!
15 hours ago, tater said:Center engines can hang down for gimbal room...

Plus this completely fixes any residual space issues.

-
I was just looking at engine config.
I can fit 28 in 8m diameter without any TVC, so I think you're probably right about a skirt. The most I can fit in 8m with any space for TVC is 24.
I think 10m may be unlikely though - that's a lot of unused space.
I think 875-900mm diameter is probably the minimum space to fit

-
57 minutes ago, tater said:
300t of thrust per Raptor... Wow that's ridiculous!
Edit: Ooh, page 1000!
-
1100bar! Wow!
-
I hope that's indicative of Raptor performance improvement and not a loss of payload!
Edit: 4-symmetry of legs agrees a bit better with 28 as well.
-
Superheavy starts production this week:
-
-
50 minutes ago, CBase said:
Unfortunately the commentator did not go into the pretty obivous differences in ascent profile: Normally SECO and Landing burn are very close together, but this time minutes apart.
Actually even at Max-Q and MECO you could see that SAOCOM-1B was on a much steeper trajectory which requires longer second engine burn. MECO this time was at T+2:25 with ~ 5940 km/h @78km altitude, last starlink for comparison MECO was at T+2:41 with ~7880 km/h @71.5 km altitude. It would be nice to know how much of this velocity difference is due to boost back to CC and which is attributed to the dog leg.
The booster burn time (and therefore MECO velocity) isn't an entirely fair comparison with Starlink as those are ASDS landings and the booster naturally burns longer and faster on those missions because it's reserving less. A better comparison would be CRS.
Good spot on the altitude though, it does look steep. Was the dogleg before or after stage sep?
-
-
It's not a big payload to be dog-legging south and returning to LZ-1!



[New] Space Launch System / Orion Discussion Thread
in Science & Spaceflight
Posted